
參賽序號:23
海報主題
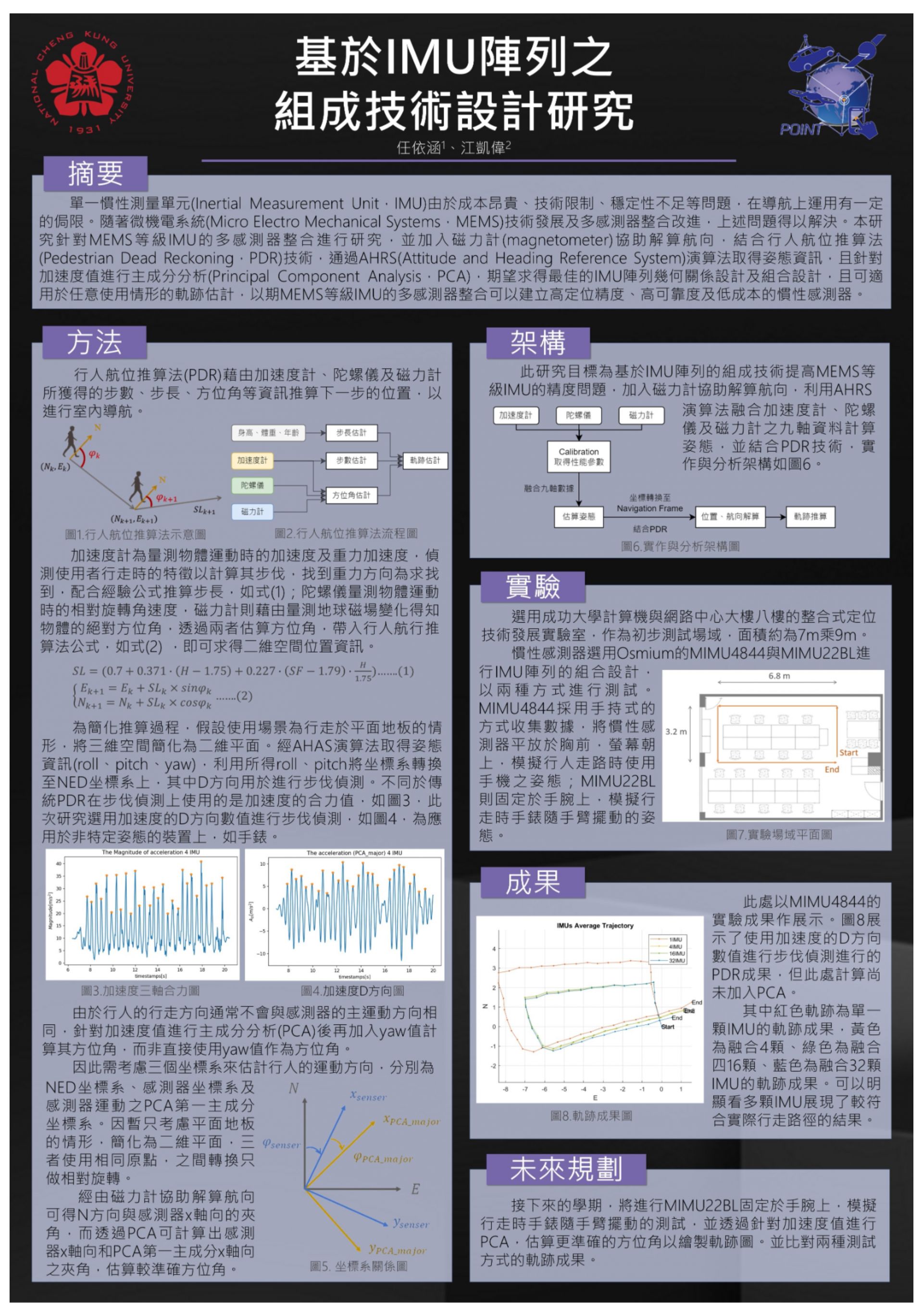
基於IMU陣列之組成技術設計研究
系級
測量及空間資訊系
指導老師及參賽學生
指導老師:江凱偉
參賽學生:任依涵
構想說明
單一慣性測量單元(Inertial Measurement Unit,IMU)由於成本昂貴、技術限制、穩定性不足等問題,在導航上運用有一定的侷限。隨著微機電系統(Micro Electro Mechanical Systems,MEMS)技術發展及多感測器整合改進,上述問題得以解決。本研究針對MEMS等級IMU的多感測器整合進行研究,並加入磁力計(magnetometer)協助解算航向,結合行人航位推算法(Pedestrian Dead Reckoning,PDR)技術,通過AHRS(Attitude and Heading Reference System)演算法取得姿態資訊,且針對加速度值進行主成分分析(Principal Component Analysis,PCA),期望求得最佳的IMU陣列幾何關係設計及組合設計,且可適用於任意使用情形的軌跡估計,以期MEMS等級IMU的多感測器整合可以建立高定位精度、高可靠度及低成本的慣性感測器。
-
分享:


 114年活動,現正報名中!
114年活動,現正報名中!