
參賽序號:16
海報主題
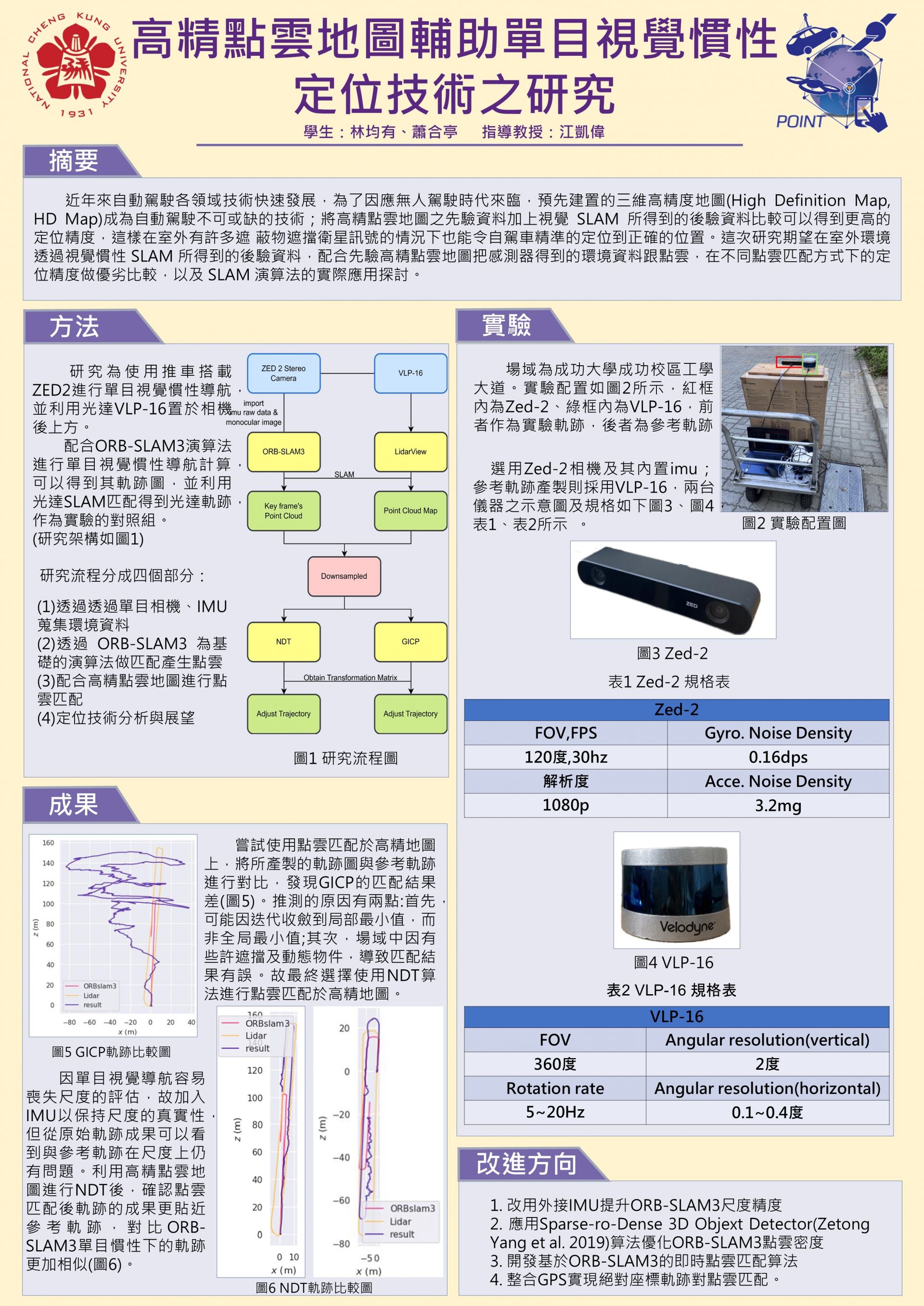
高精點雲地圖輔助單目視覺慣性定位技術之研究
系級
測量及空間資訊學系
指導老師及參賽學生
指導老師:江凱偉
參賽學生:林均有
構想說明
近年來自動駕駛各領域技術快速發展,為了因應無人駕駛時代來臨,預先建置的三維高精度地圖(High Definition Map,HD Map)成為自動駕駛不可或缺的技術;將高精點雲地圖之先驗資料加上視覺 SLAM 所得到的後驗資料比較可以得到更高的定位精度,這樣在室外有許多遮 蔽物遮擋衛星訊號的情況下也能令自駕車精準的定位到正確的位置。這次研究期望在室外環境透過視覺慣性 SLAM 所得到的後驗資料,配合先驗高精點雲地圖把感測器得到的環境資料跟點雲,在不同點雲匹配方式下的定位精度做優劣比較,以及 SLAM 演算法的實際應用探討。
-
分享:


 114年活動,現正報名中!
114年活動,現正報名中!